NERD Toolkit
The Neurodynamics and Evolutionary Robotics Development Toolkit
News: NERD Toolkit Version 4.3 Released Under GPL!
2008 - now. The NERD Toolkit is a high-quality, rapid prototyping software framework in C++ for research in the field of evolutionary robotics, neurorobotics, (learning) recurrent neural networks, and neurocybernetics. All applications based on the NERD Toolkit are Open Source and can be used under an extension of the GNU General Public Licence (GPL).
The NERD Toolkit can be downloaded through the official NERD Homepage: nerd.x-bot.org.
The NERD Toolkit currently provides the following features:
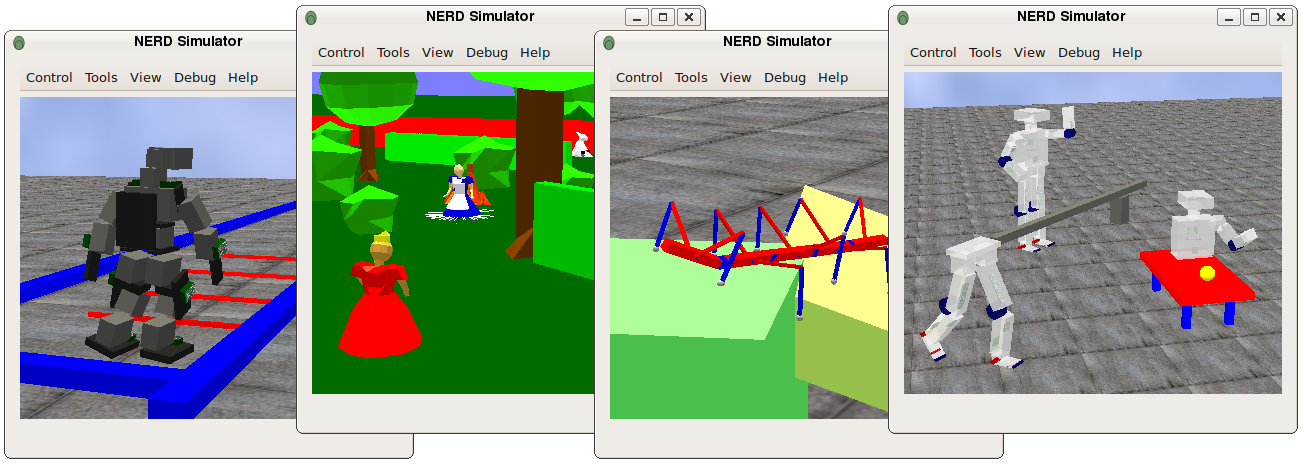
- Powerful Animat Simulation
- Scriptable Animats
- Scriptable Experiment Scenarios
- Many Chooseable Physical Building Blocks
(Motors, Sensors, Physical Objects, Full Aniamts) - Physics Abstraction Layer
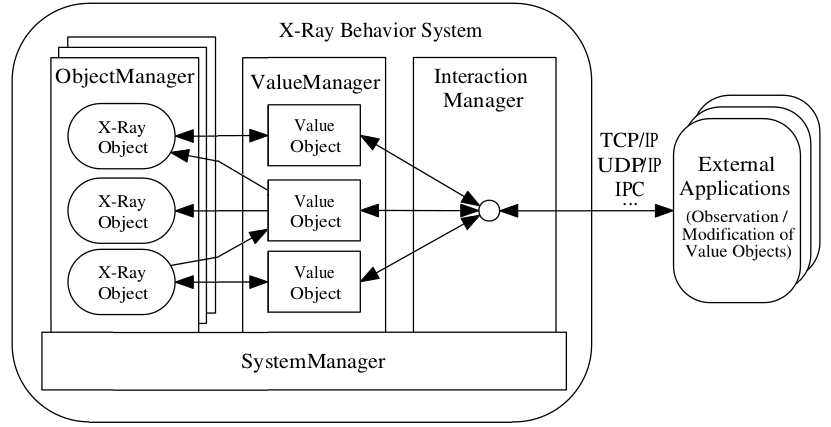
- Full Visual Access to all Internal Variables
(Logging, Plotting, Analysis, Modification) - Multiple Camera (also Sensor) Support
- Interactive Animat Control and Manipulation
- Deterministic Randomization
- Flexible Neural Network Layer
- Object Oriented Neuron Model
- Choice of Transfer, Activation and Synapse Functions
- Heterogenous Networks
- Native Support for Neuro-Modules
- Network Annotations (Network Tags)
- Constraint Functions to Define Constraint Masks
- Support for Plasticity and Learning Rules
- Supports Extensions for Most Neuro Models
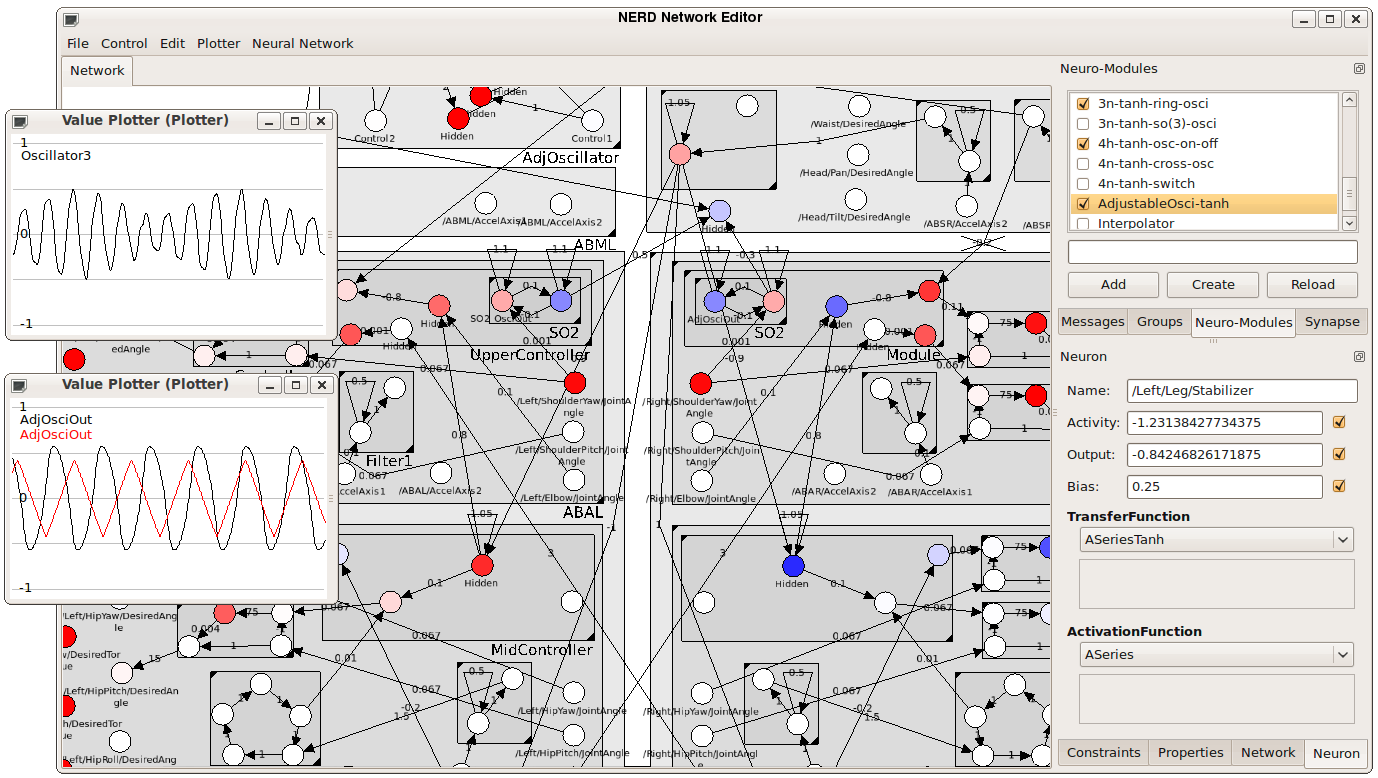
- Interactive, Graphical Neural Network Editor
- Layout, Connectivity, Management Tools
- Interactive Modification and Observation
- Many Analysis and Pruning Features
- Exports to Robot Hardware
- Undo Mechanism
- Extendable Evolution Layer
- Choice of Evolution Algorithm
- Interactive Evolution
- Logging and Analysis of Evolution Runs
- Computer Cluster and Multi-Core Support
- Supports Constrained Neuro-Evolution (ICONE Method)
Experiments with the NERD Toolkit can be realized fast and with little learning effort. Most experiments can be realized directly with the available software applications via scripting interfaces. So, no programming in C++ is required. However, for more advanced experiments, e.g. the realistic simulation of specific sensors or the use of custom neural network models, all NERD applications support plug-ins through which the required components can be added flexibly.
Licenses: GNU General Public Licence (GPL)
Q Public License (QPL)
Try the NERD Toolkit for your own experiments!