
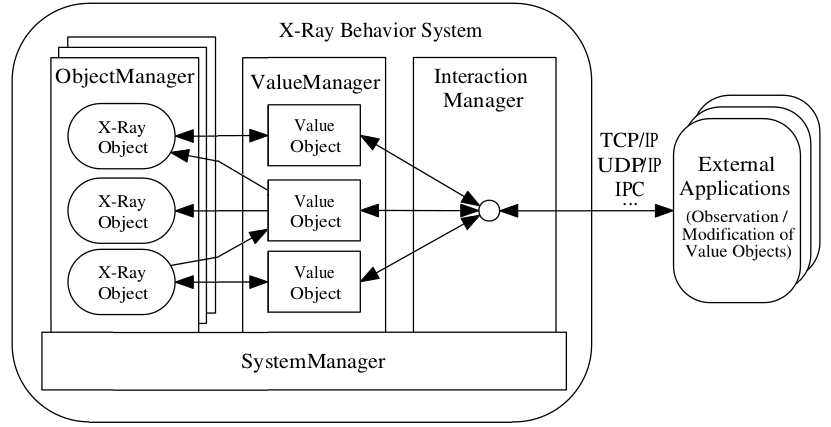
The X-Ray Robot Middleware was implemented in the context of Robocup (Midsize Leaque) to provide an extensible, reusable framework to define behaviors and coordination strategies for situated robots. The X-Ray middleware uses facades, proxies and transition values to encapsulate internal, inter-process and network communication between components. This allows, for instance, to monitor all important internal variables at real-time, configure systems (remotely), send messages to other robots without direct addressing, allow a shared memory between the robots, and incorporate internal and external sensor processing software in a fully transparent way.
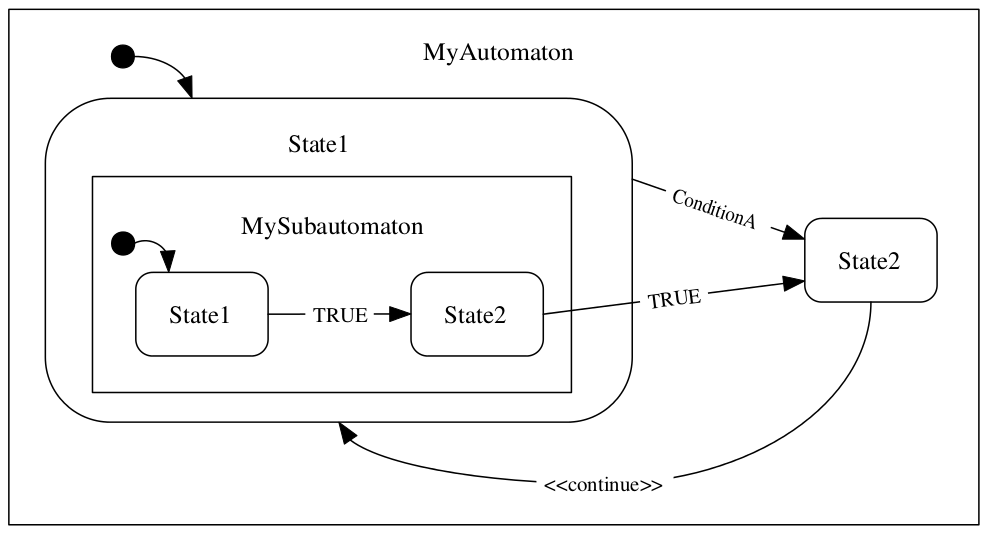
X-Ray suggests the use of a specific task manager format, hereby supporting different behavior coordination mechanisms, such as simple macros to define finite state automata. The middleware can be used to create stand-alone applications, but it also allows an integration to existing frameworks, such as IConnect.
More Details on this software project will be added soon!
In the meanwhile, please refer to the official report below to learn more about the project.Contributors:
- Implementation:
- Christain Rempis
- Institute: